

Recently, biohybrid approach has been intensively explored to construct soft devices/robotics with novel functions. By integrating living organisms with synthetic materials, biohybrid systems may reproduce some characteristics of biology including sophisticated performance, intelligent and autonomous control, high energy efficiency, and high adaptivity to the surroundings. However, the functions of current biohybrid systems are still limited to the following types: biohybrid actuators/robots by combining the contraction of muscular/cardiomyocyte cells with synthetic skeletons; biohybrid chemical sensors by combining the bacteria sensing (e.g., E. Coli) with permeable materials; tuning properties of synthetic materials with the metabolisms of living organisms (e.g., cellular respiration or photosynthesis). However, biohybrid systems with mechanical sensing capabilities have seldom been explored yet although mechanical stimuli are the most important signals in nature. In addition, several challenges still exist hindering the wide applications of biohybrid systems such as complex fabrications, relatively short lifetimes, necessary special maintenance, and slow response of sensing stimuli.
To solve the above issues and inspired by bioluminescent phenomena, researchers from UCSD proposed a simple method to build a highly robust, power-free, and ultra-sensitive biohybrid mechanoluminescence by encapsulating oceanic bioluminescent dinoflagellates into soft elastomeric chambers. Dinoflagellate bioluminescence is a response to mechanical stress either in flow or under touch, involving a complex intracellular signaling pathway (Movie 1). Such bioluminescence is a visibly remarkable phenomenon often occurring in coastal areas. Stress levels as low as several Pa can activate dinoflagellate bioluminescence with a latency from stimulus to response of only 15-20 ms, resulting in ultra-high and near-instantaneous force sensitivity.
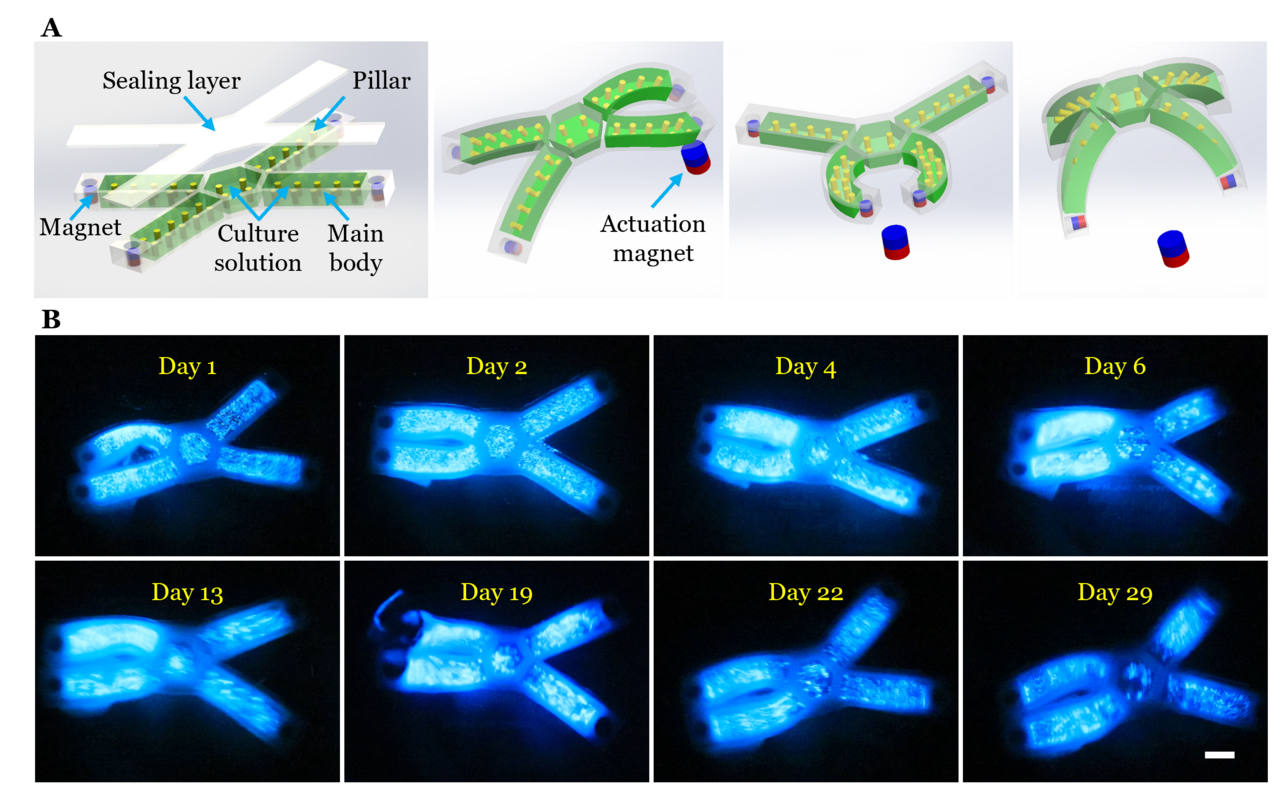
Such biohybrid device was fabricated by encapsulating a culture solution of the photosynthetic dinoflagellate Pyrocystis lunula (P. lunula) with a soft and transparent elastomer chamber (Fig. 1A). This species was widespread globally in many oceans of the world, indicating that it is tolerant to a broad range of environmental conditions. During the light phase, P. lunula carried out photosynthesis to produce oxygen and storage energy. During the dark phase, deformation of the biohybrid device caused the motion of the encapsulated fluid, resulting in shear stress applied to P. lunula to activate the bioluminescence. The biohybrid device is highly transparent to visible light and highly deformable without rupture (Fig. 1B). Based on the high sensitivity of P. lunula, the biohybrid device can respond to diverse mechanical stimuli and emit light (Fig. 1C, D). Before mechanical stimulation, the device was totally dark in a dark environment. Under stretching, compression, or free vibration, the deformation of the device induced the flow of internal fluid and then activated the bioluminescence. By simply mixing color dyes with the precursor of the elastomeric chambers, the original blue-green bioluminescence can be shifted to other colors (Fig. 1E and Movie 2), which can be useful for practical applications.

Figure 1. Design, working principle and simple demonstrations of the soft biohybrid mechanoluminescence.
Depending on specific species, bioluminescence performs diverse functions such as defense against predators, mate/prey attraction, illumination, and intraspecific communication. With such inspiration, researchers further demonstrated potential applications of the biohybrid mechanoluminescence in soft robotics (Figure 2). In the light phase, the soft biohybrid robot integrated with dinoflagellate culture solution is charged with sunlight for photosynthesis to produce oxygen, providing energy for the organism. In the dark phase, the biohybrid mechanoluminescence have several following functions. First, the mechanoluminescent devices can be used to visualize external mechanical perturbations caused by direct contact or airflow (Movie 3). Second, the mechanoluminescence of the device can illuminate the surrounding dark environment (Movie 4). Third, by designing the deformation modes of the soft robot, diverse luminescent patterns can be displayed for potential optical signaling in the dark (Movie 5 and Movie 6). Most importantly, such biohybrid mechanoluminescent soft robot is ultra-sensitive with a fast response that can maintain its light emission capability for weeks without special maintenance (Movie 7). Researchers believe that introducing intelligent biological behaviors into soft robotics will be an important future goal to enable more novel applications.

Figure 2. Schematic of the working principle and potential applications of the biohybrid mechanoluminescence.
For more details, please see the recent article published in Nature Communications:
Chenghai Li, Qiguang He, Yang Wang, Zhijian Wang, Zijun Wang, Raja Annapooranan, Michael I. Latz, and Shengqiang Cai. Highly robust and soft biohybrid mechanoluminescence for optical signaling and illumination. Nature Communications 13, no. 1 (2022): 1-13.
For more information about Prof.Cai’s research, please visit the following website: https://caigroup.eng.ucsd.edu/
For more information about bioluminescence, please visit Prof.Latz’s website: https://latzlab.ucsd.edu/



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in